Programmation
La programmation du drone s'appuie sur l'utilisation de structures algorithmiques (variables, instructions conditionnelles, boucles, fonctions) et d'un langage de programmation à partir duquel on sélectionne les Instructions[1] spécifiques aux capteurs et actionneurs.
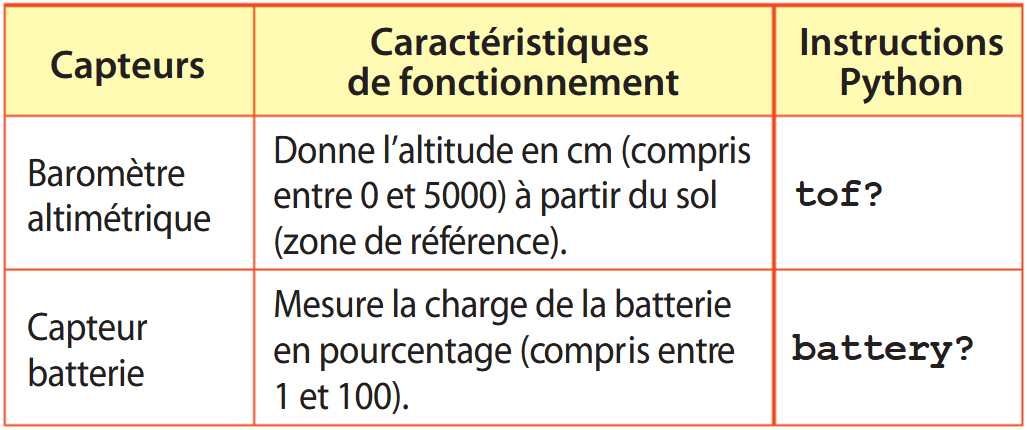
Le tableau ci-dessous présente les variables utilisées dans la programmation du drone. Ces variables serviront à stocker les informations nécessaires au fonctionnement . Ainsi, ci-dessous, la variable tof permettra de stocker l'altitude du drone.
![]()
Préciser à quoi sert la variable battery.
Ces variables sont utilisées pour l'exécution des algorithmes.
Ci-dessous, l'algorithme de gestion de l'atterrissage d'urgence du drone en cas de batterie faible est présenté.
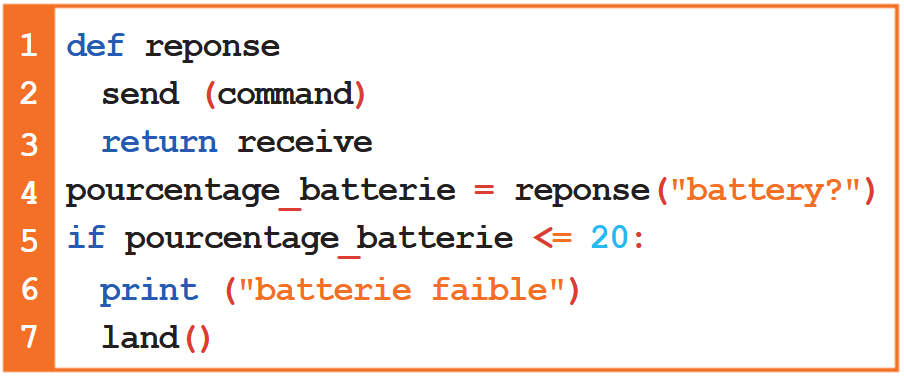
Dans cet algorithme :
les lignes 1, let 3 : définissent la fonction « reprise ()» qui envoie une instruction au drone et attend sa reprise,
la ligne 4 : permet de stocker la valeur du niveau de charge de la batterie renvoyée par le drone,
la ligne 5 : teste le niveau de charge de la batterie en vérifiant si il est inférieur à 20
la ligne 7 : instruction land() fait atterrir le drone.
![]()
Ajouter les lignes de code qui permettent d'afficher le niveau de charge de la batterie si le niveau de charge est supérieur à 20.